|
JaiaBot 2.7.0
JaiaBot micro-AUV software
|

|
|
JaiaBot 2.7.0
JaiaBot micro-AUV software
|
|
Preliminary JaiaBot system block diagram:
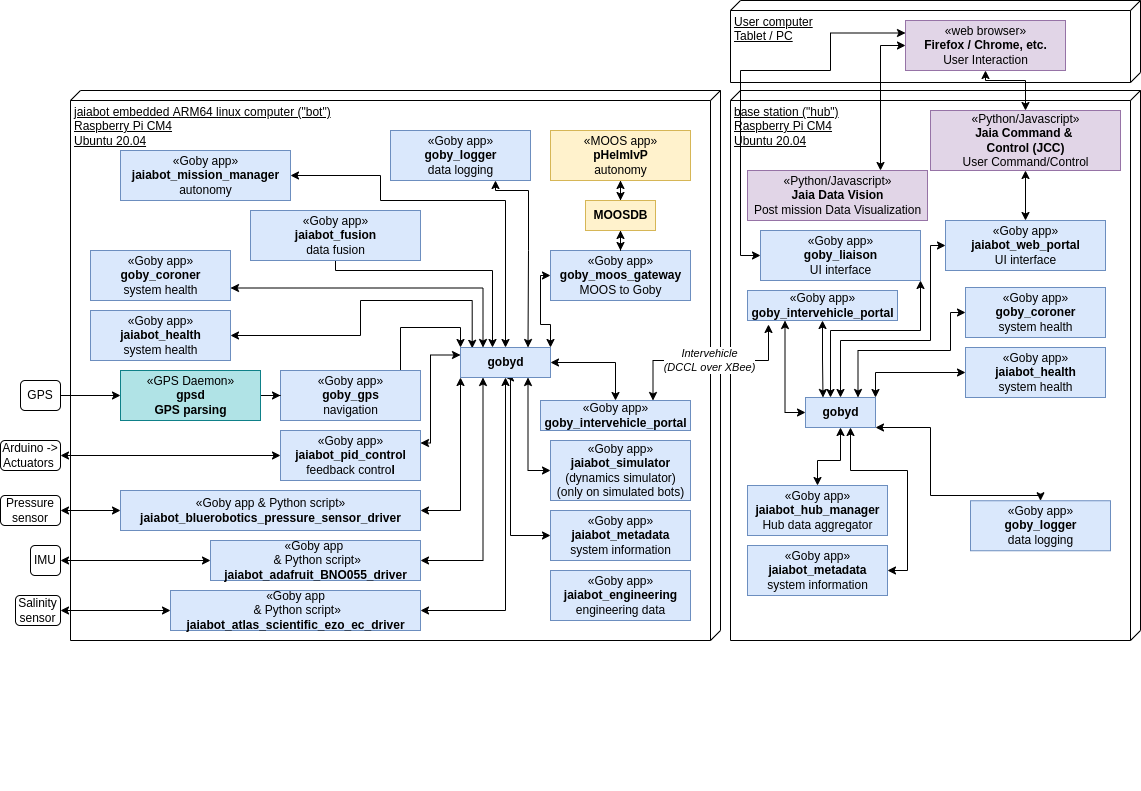
jaiabot is based primarily on two publish/subscribe asynchronous middlewares:
Goby3 forms the core of the communications design, providing interthread, interprocess, and intervehicle communications. MOOS-IvP provides the behavior-based autonomy implementation using the pHelmIvP multi-objective decision engine.
In addition, we expect to support clients using ROS in the future.
goby_coroner: Provides health status from the output of each of the Goby applications.goby_gps: Takes GPS data from gpsd and publishes it to the gobyd.goby_liaison: Host a web interface on the platform to view and send Goby messages.goby_logger: Subscribes to messages in the gobyd and logs them to the disk.goby_moos_gateway: Gateway to MOOS applications.goby_ros_gateway: Gateway to ROS middleware.goby_opencpn_interface: Interface from Goby3 to OpenCPN (not run from systemd, but feel free to use in the simulator).gobyd: The Goby3 daemon which handles the publishing and subscribing.jaiabot_as-ezo-ec_py: Python driver for Atlas Scientific conductivity sensor.jaiabot_udp_gateway: Middleman between our python drivers and the Goby system. Listens on UDP to Python driver and republishes as a Goby3 message.jaiabot_driver_arduino: This is the driver for the Arduino which controls the elevators, rudder, motor, diagnostic LEDs, and power monitoring.jaiabot_engineering: Handles commands from the Engineering Interface web page to set and test low level functionality.jaiabot_fusion: Assembles the goby::middleware::frontseat::protobuf::NodeStatus message used by the goby_moos_gateway from the goby_gps output, pressure sensor, and other sources, as needed.jaiabot_health: Overall system health using data from goby_coroner and eventually other sources.jaiabot_hub_manager: Interface between the bots and the web sites. Sends and receives inter-vehicle messages on the radio and republishes / subscribes to their Goby3 counterparts on inter-process.jaiabot_imu_py: Python driver for Adafruit bno055 IMU.jaiabot_metadata: Logs information about the system including current jaiabot build number, current Goby3 build number, computing platform, etc.jaiabot_mission_manager: Keeps a state machine of the overall mission state and switches from pHelmIvP control to profile mode as required.jaiabot_pid_control: Determines values to output to motor and control surfaces via pid control loopsjaiabot_pressure_sensor_py: Python driver for Blue Robotics Bar02 and Bar30jaiabot_web_portal: Interface between Goby3 and the Flask web server on the hub.jaiabot_power: Power management and circuit control.jaiabot_lights: Light control (perhaps part of jaiabot_power instead?).jaiabot_payload_interface: Pluggable interface for different payload data feeds to be logged.moosdb: The main communication mechanism for all MOOS apps.pHelmIvP: Pluggable behavior based autonomy.pNodeReporter: Aggregates NAV_* variables into NODE_REPORT variable for pHelmIvP.uprocesswatch: Monitors the health of MOOS processes.