|
JaiaBot 2.7.0
JaiaBot micro-AUV software
|

|
|
JaiaBot 2.7.0
JaiaBot micro-AUV software
|
|
Starting with the BIO variant, JaiaBots will use a unified sensor board (with a microcontroller for low level I/O, the "sensor MCU"), and the main computer (Raspberry Pi) will auto discover the bot type and sensor suite by querying the sensor MCU.
The application jaiabot_sensors is responsible for communicating with the sensor MCU, and handling the data processing pipeline from here.
Implementing this pipeline is a work in progress, but the overall vision for the architecture is in the following figure:
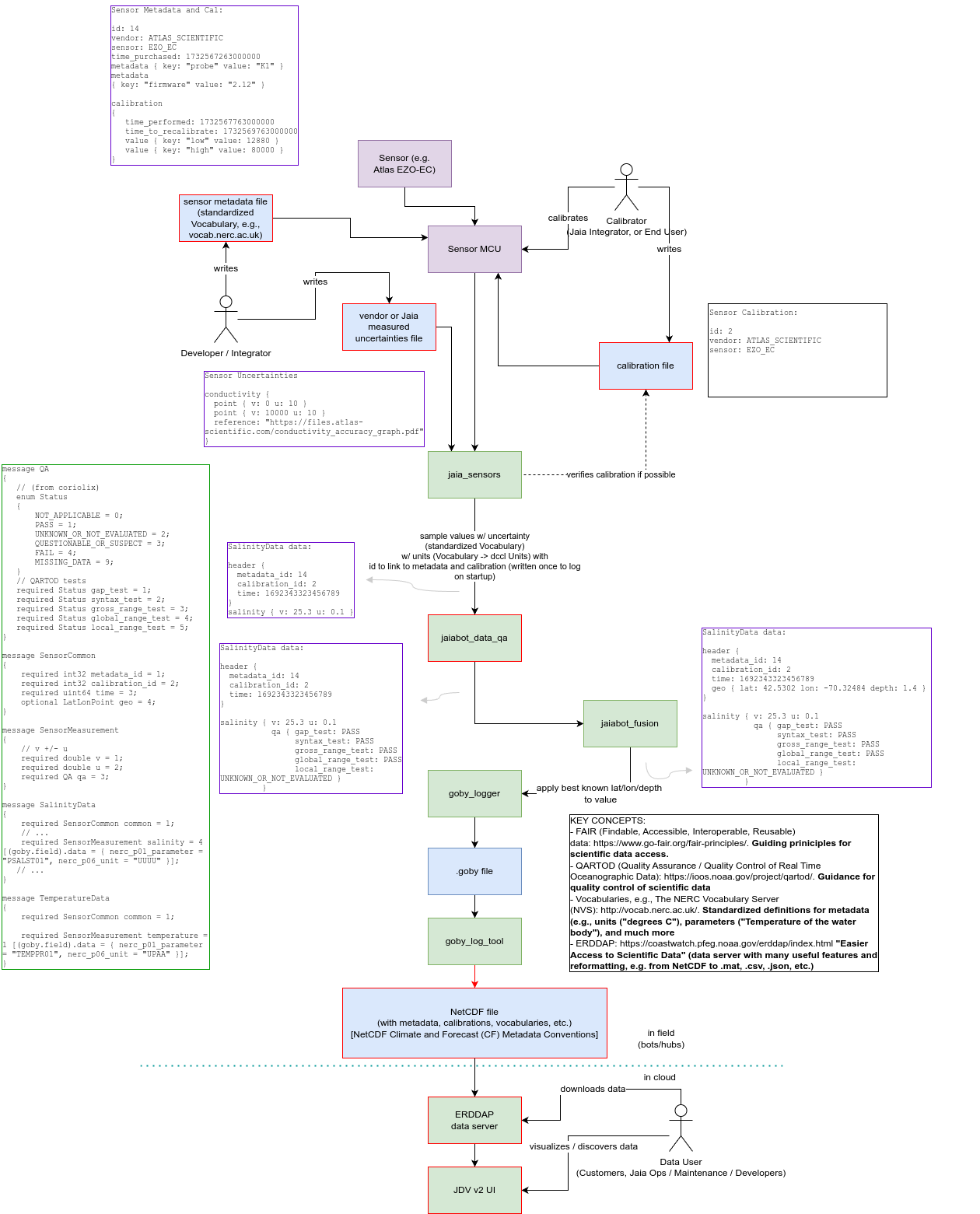
The MCU should do the minimum amount of processing required to provide raw data to the jaiabot_sensors application. Any empirical calculations (e.g. conductivity to salinity, CTP to sound speed, etc.) should be done in the jaiabot_sensors driver. This is intended to keep the MCU code as simple as possible and high performance.
All data processing, metadata tagging, applying calibration, QA/QC is done in jaiabot_sensors.
The MCU/Raspberry Pi communications is performed over a serial connection using the Consistent Overhead Byte Stuffing (COBS) protocol for packetization. Each COBS message is composed of an encoded Protobuf message followed by a CRC32 for error detection:
For messages to the MCU, the jaiabot::sensor::protobuf::SensorRequest Protobuf message is always used, and for message from the MCU, the jaiabot::sensor::protobuf::SensorData message is always used. Both are defined in jaiabot/src/messages/sensor/sensor_core.proto.
Both messages are compiled for C++ (libjaiabot_messages.so) and for C (libjaiabot_messages_c.so) using NanoPB. They are designed using NanoPB to be a fixed size for static memory allocation. This is checked at compile time by the unit test in jaiabot/src/test/sensor/nanopb/test.c.
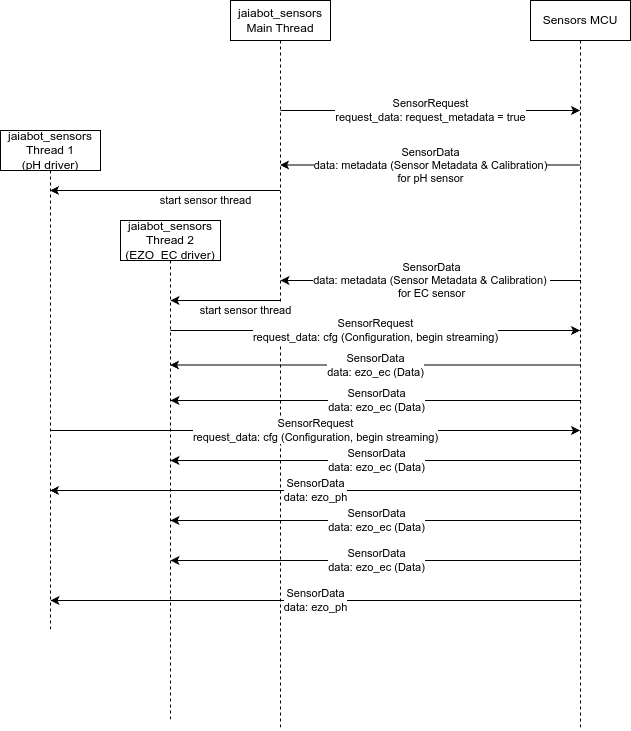
The MCU is not expected to do anything until it receives a SensorRequest message from the jaia_sensors application. Once this message is received, it responds with the metadata for each sensor connected (one message per sensor). jaiabot_sensors uses this metadata message to launch the correct sensor driver threads.
Once each thread launches, it sends a SensorRequest message with the cfg (configuration) field populated. This includes any required configuration for the MCU for that sensor. At a minimum this is the desired sample rate, but can include arbitrary strings as required.
Once the SensorRequest.cfg is received, the MCU is expected to stream the desired data at the requested frequency without any further messages from the jaiabot_sensors application. If any commands are required for a particular sensor (e.g., stop sampling, update configuration, etc.), these will be included in SensorRequest.
This figure shows an example of starting an EC and pH driver: