|
JaiaBot
1.20.0
JaiaBot micro-AUV software
|


|
|
JaiaBot
1.20.0
JaiaBot micro-AUV software
|
|
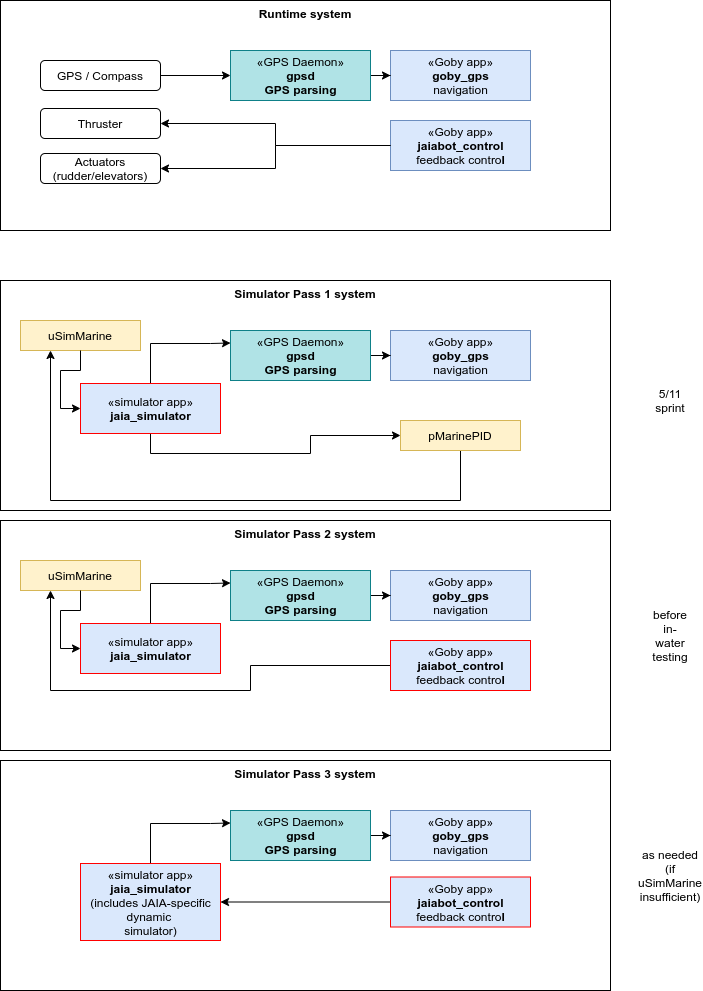
The jaiabot simulator (jaia_simulator) is intended to provide a full system simulation capable of faster-than-realtime simulation of the relavant software components.
Whenever possible, the simulator interfaces with the rest of the system using the same API and drivers as the actual sensors and other hardware.
Building the simulator will be an incremental process, adding additional subsystem functionality as we progress.
This subsystem within the simulator provides simulated vehicle positions in a simple model ocean based on desired control inputs.
We will develop this simulator in several steps, starting with the most accessible open source software and progressing to a higher-fidelity jaia-specific implementation over time.
A more detailed diagram combined from the output of goby_clang_tool for the Goby3 components and hand-drawing for the non-Goby parts is given below:
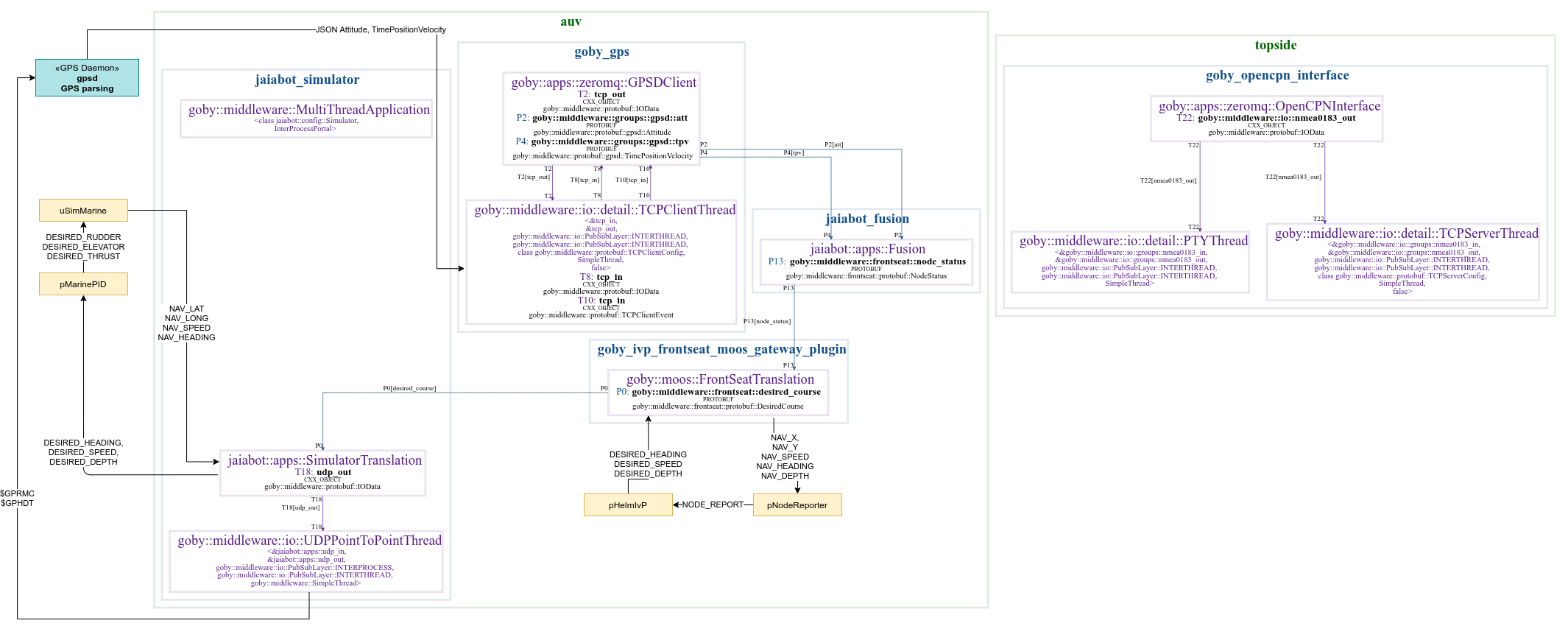
The following figures are autogenerated using goby_clang_tool from the simulator_deployment.yml deployment file.

