|
JaiaBot
1.20.0
JaiaBot micro-AUV software
|


|
|
JaiaBot
1.20.0
JaiaBot micro-AUV software
|
|
The Jaia bots and hubs communicate using two types of wireless radio:
During real (as opposed to simulated) operations the XBee radio is used for all hub to bot operational communications (BotStatus, Command, etc.). The Wifi link is only used for data offload. During simulated operations the (simulated) Wifi link is used for all communications (no XBee simulator has been implemented).
Bot to Hub communications (and vice-versa) is based on the intervehicle layer of the Goby3 middleware. This is a publish/subscribe model, with explicit messages sent to initiate actual communications over the radio link (subscription forwarding).
Each physical radio is interfaced with using a driver implemented from goby::acomms::ModemDriverBase. The XBee driver is in the jaiabot repository in the src/lib/comms/xbee directory. The UDPDriver from Goby3 is used for Wifi communications (during simulation). Data offload is not sent via Goby3 but rather uses rsync over SSH.
The XBee radios (Digi XBee-PRO 900HP S3B Radio) have two operating modes. They can act as wireless serial ports in their default "transparent" mode, or they can act as packet-based radios in their "API" mode. The Jaia XBee driver uses the radios in the "API" mode which uses a combination of AT commands (Hayes radio) and Digi API (binary) commands over serial.
See this document for documentation on the XBee radio and its software interface:
The XBee driver is comprised of two main components:
jaiabot::comms::XBeeDriver which implements goby::acomms::ModemDriverBasejaiabot::comms::XBeeDevice which talks directly to the serial device and XBee radio. Each XBeeDriver contains an XBeeDevice.The XBee driver takes the following configuration (within gobyd's configuration) as an extension to the goby.acomms.protobuf.DriverConfig Protobuf message (see jaiabot/src/lib/messages/xbee_extensions.proto):
The peers table must match for all bots and hubs in a particular fleet, and is required since the XBee serial numbers are factory set and cannot be changed. The encryption settings must match as well for the fleet.
An example configuration for hub 1 in a two bot/two hub fleet is:
and for bot 0 in the same fleet:
The XBeeDriver converts the required parts of goby::acomms::protobuf::ModemTransmission (with a single data frame, max_frame_size = 1) into the xbee::protobuf::XBeePacket Protobuf/DCCL message and encodes it using DCCL (but removes the 2 ID bytes as these are unnecessary as the XBeePacket is the only message sent on the XBee link). This resulting encoded DCCL message (minus the first 2 bytes) is sent as the payload of the XBee API Transmit Request (0x10) message.
ACKS are implemented by sending an XBeePacket with type = ACK set and the appropriate acked_frame for the frame being acked.
XBeePacket is defined in jaiabot/src/lib/comms/xbee/xbee.proto. The XBee radios have a packet payload size of 256 bytes. With the required header items from ModemTransmission, the XBeeDriver can currently support DCCL message payloads up to 250 bytes (max_frame_size = 250).
Jaia fleets can support multiple hubs within a fleet, but only one hub may be used at a time (unless the hubs are separated by enough physical distance that XBee communications are impossible between the hubs and bots within the subfleet). Multiple hubs are only supported during real (runtime) operations using XBee communications – simulation still only supports one hub using UDPDriver.
Hubs are identical (same IP addressing, same Wifi SSID) except for a unique hub_id. In addition to the analogous ModemTransmission fields, the XBeePacket includes a field for the hub_id to be set. When the bots receive a new hub_id, this triggers a (re)subscribe for any intervehicle subscriptions from the hub (e.g., Command) so that the new hub receives these subscriptions. This means that no subscriptions are sent until the first message from a hub (typically the hub's subscriptions to BotStatus, etc.) is received. The XBeeDriver also updates which XBee serial_number to use for sending messages to the hub.
At this time the single modem id 1 is used for all hubs. Thus, within a given subfleet, modem id 1 is always the hub, and modem ids 2 to N+2 are used for all the bots 0 to N.
The following sequence diagram illustrates this process by using the example of hub0 being replaced during operations by hub1 (such as due to failure of hub0). The same concept applies if hub1 was used from the start.
The intervehicle subscriptions are set up when hub0 sends its subscriptiosn, and then re-sent after hub1 sents its subscriptions. If both hubs were used simultaenously (which they should not), the bots would alternate sending messages to hub0 and hub1 (based on which hub was received from last).
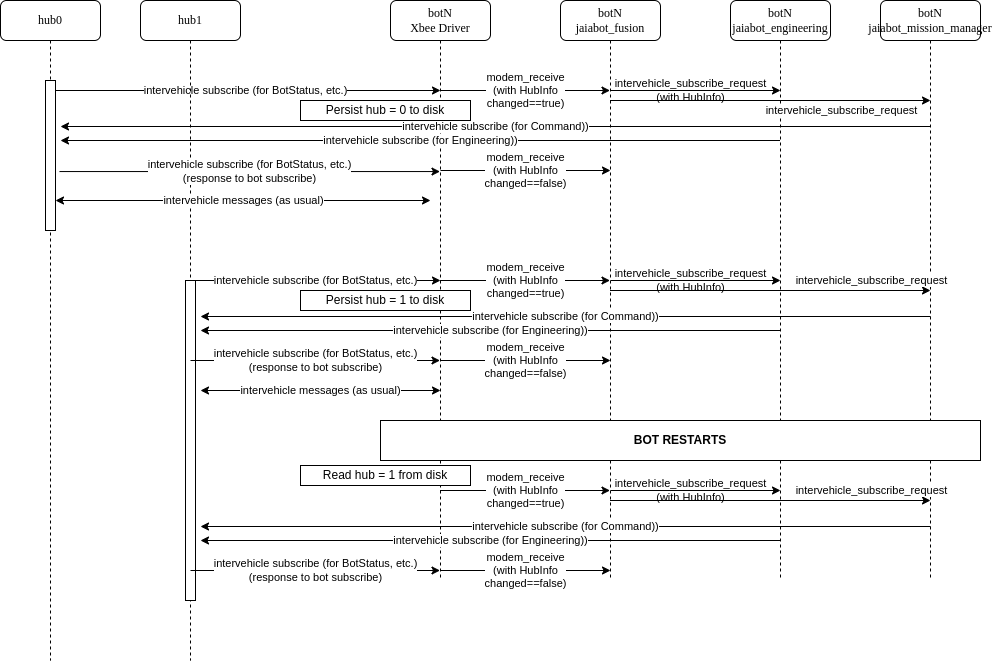
For log analysis purposes, the current hub in use by a given bot can always be determined by the hub_id present within the HubInfo protobuf message sent on the jaiabot::intervehicle_subscribe_request group.